Cuando un terremoto es capaz de excitar ondas de tsunamis, se debe principalmente a los movimientos verticales permanentes que son transferidos desde el fondo del mar hacia la superficie del océano. Los movimientos horizontales también pueden contribuir, aunque en general representan menos del 5% de su contraparte vertical. A pesar de que esta transferencia tiene una duración de un par de minutos, en muchas situaciones, se considera que este movimiento vertical ocurre de forma instantánea.
En otras palabras, la deformación permanente que se produce en el fondo oceánico, se traspasa instantáneamente a la superficie del océano, y luego esta perturbación se propaga a consecuencia de la fuerza de gravedad. La razón de esta suposición es que las escalas de tiempo de un terremoto tienen una acción mucho más corta que un tsunami. De hecho, un terremoto “común” se fractura a una velocidad de 10 a 15 veces más rápido de lo que se propaga un tsunami.
Otra simplificación común, especialmente cuando no hay suficiente información disponible, es idealizar el terremoto como un plano de falla que se desliza en forma “pareja” en todos sus puntos. A esto se le llama escenario de deslizamiento uniforme. Como es de esperar, esta situación no es un escenario realista, ya que muchos de los aspectos que caracterizan a un terremoto son ignorados.
Para tomar en cuenta de mejor manera las propiedades físicas de un terremoto, se requiere una “imagen” de la fuente sísmica. Esto se conoce como Modelo de Falla Finita (FFM, por sus siglas en inglés). Usualmente, estos modelos se construyen mediante un proceso llamado “inversión”, el cual consiste en la integración de distintos datos observados de modo que la solución que se obtenga reproduzca lo mejor posible dichas observaciones. La determinación de un hipocentro o una TC (tomografía computarizada, en medicina) son ejemplos de inversiones.
Entonces, ¿cómo afecta todo esto para simular un tsunami? Para ilustrar esto, tomemos el último gran terremoto que produjo un tsunami: el Terremoto Mw 8.3 de Illapel, del 16 de Sept. del 2015.

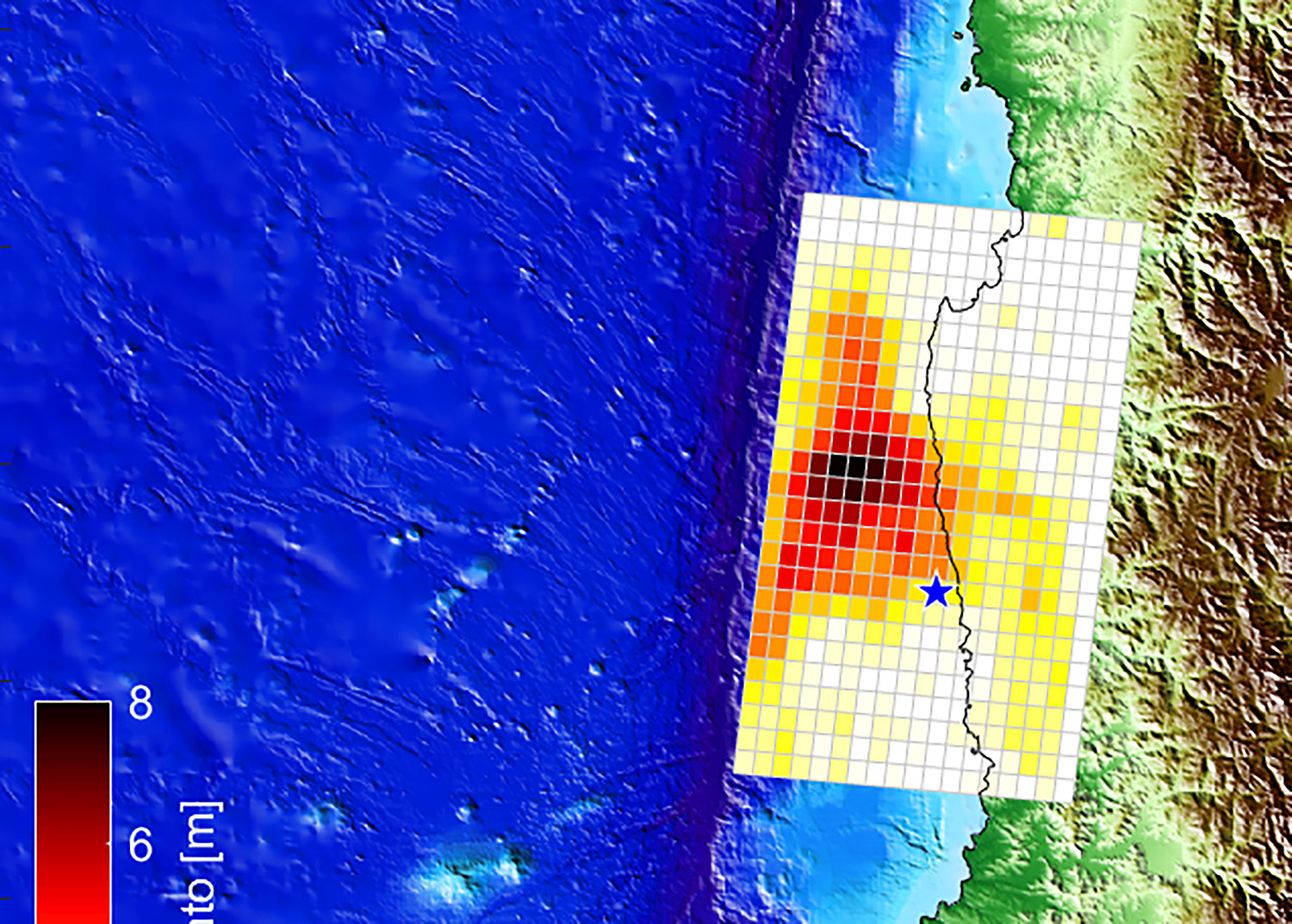
(A la izquierda) Distribución de deslizamiento. (A la derecha) Tiempo de ruptura.
En la figura 1 se muestra el modelo de falla finita obtenido por el Servicio Geológico de Estados Unidos. Éste se obtiene utilizando la información de las ondas sísmicas que llegan a estaciones lejanas o tele sísmicas (más de 1000 km desde su origen).
Como se observa, esta es la “imagen” de la fuente sísmica que antes se mencionaba. También se puede observar que esta “imagen” se desarrolla casi por completo dentro de unos dos minutos. Con esto, es posible entonces simular el tsunami asociado a este terremoto.
Sin entrar en los detalles matemáticos necesarios para esta tarea, lo que hay que retener es que, si se decide o no tomar en cuenta el tiempo de la fuente sísmica, significa que la forma de simular el tsunami será diferente.
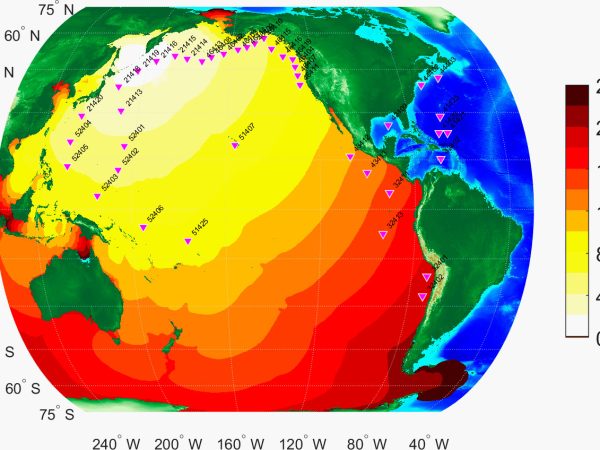
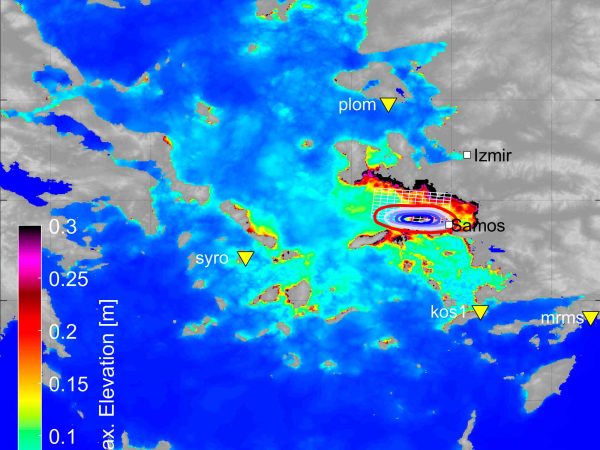
Esto se ejemplifica en la figura 2, donde se ha calculado la propagación de un tsunami generado por el terremoto descrito en la figura 1, en tres situaciones: si el deslizamiento es igual en todos los puntos a un valor promedio e instantáneo; el deslizamiento es heterogéneo pero instantáneo y finalmente, el deslizamiento es heterogéneo y la fuente sísmica no ocurre de forma instantánea, sino que se toman en cuenta esos dos minutos que demora en desarrollarse. Se simulan seis estaciones virtuales, imaginando que en esos puntos existiera una estación capturando datos, tal como lo hacen en la práctica las boyas DART posicionadas alrededor de los océanos del mundo.

Es claro que al considerar la complejidad de la fuente, tanto espacial como temporal, la radiación de energía del tsunami es diferente y ciertas zonas de hecho sufren mayores amplitudes. También, los tiempos de llegada (tiempo en el que se registra el paso de la primera onda) se ven alterados.
En la figura 3 se muestra el registro de las estaciones virtuales desplegadas en la figura 2. Se puede observar que el caso uniforme es el que presenta mayor disparidad. Los casos heterogéneos (o No uniformes) con y sin tiempo, presentan similitudes generales, pero poseen diferencias importantes.
Algunas de ellas se ven a simple vista, como la diferencia en los peak de amplitud y en el tiempo en que éste se alcanza. Esta diferencia en algunos casos es de 1 a 2 minutos. Menos evidente (y más técnico), es el contenido de frecuencia asociado al retardo de las sub fallas que se activan de forma asíncrona.

Todos estos efectos se podrían potenciar ante situaciones menos frecuentes, como terremotos con velocidades de ruptura más pequeñas de lo normal, o terremotos de tamaños colosales, como el gran terremoto de Valdivia de 1960.
En ciertas aplicaciones, se utilizan las observaciones de registradas por el paso de un tsunami en boyas DART o mareógrafos (estaciones de nivel del mar). Es muy importante tener calibrados estos datos y el modo en que se pretende explicarlos mediante el proceso de inversión. Incluso, diferencia en un par de minutos podría conducir a errores que finalmente se traducen en un modelo incompleto y menos confiable. Así que, en estricto rigor, el modelamiento de tsunamis siempre debería incluir las características temporales de la fuente sísmica, ya que se trata de una situación más general: si la duración del terremoto es muy corta, entonces se reencuentra el caso instantáneo.
Para finalizar, se deja el siguiente video con la simulación del tsunami de Illapel, cuando se incluye la duración del proceso de ruptura de la fuente:
Mauricio Fuentes, investigador PRS.
{kind=link}